Flight-Dynamics Data Logger
|
|
| This page needs to be totally revised and merged with Flight-Dynamics Model and Genetically Programmed Flight-Dynamics Model for Machine Learning of Flight Control to reflect the nature of the work I'm currently doing. |
| For now, it somewhat loosely describes the tools I developed for collecting data for a flight-dynamics model that I used in Software Engineering recently, as well as for the Three-Axis Electromechanical Flight-Simulation Gimbal, among other purposes. |
|
|
|
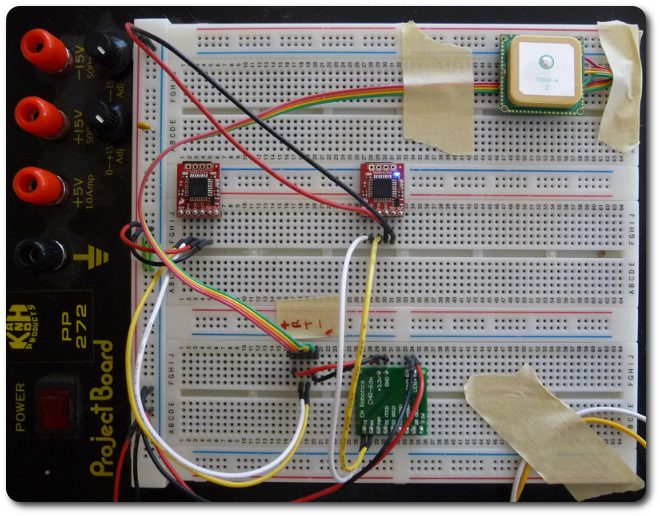
This is the powered breadboard for the prototype of the data-collection device. I can't even count how many times I've used this thing — it's awesome. Unlike all my other projects, there's almost nothing to this one but a few smart components that communicate over a serial interface. In fact, the only analog component in the entire system is the 0.01pF decoupling capacitor between the supply rails in the upper left. I doubt it's even necessary because the components likely have their own.
|
|
|
The GPS receiver is ridiculously small. I put it on a ribbon cable (red/orange/yellow/green above) thinking it would need flexible placement, but no, it picks up a signal from my basement.
|

|

|
|
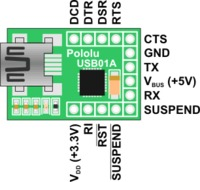
For testing, it's connected through a serial-to-USB converter to my laptop. Sadly, not a lot of machines have serial or parallel ports anymore. USB is great for many things, but nothing beats a direct connection sometimes, especially for low-level tinkering.
|

|
|
|
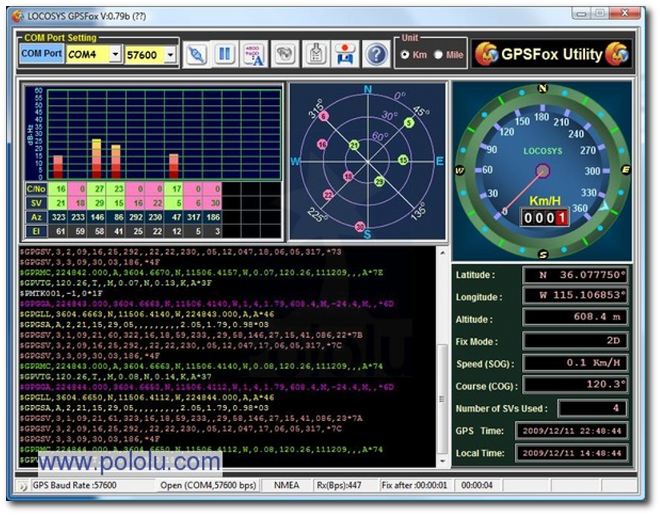
The GPS receiver has software for real-time updates. This is nice when there's a computer available, but for this project, I need a standalone system.
|
|
|
|
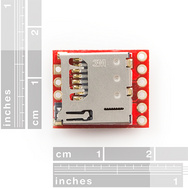
So I'm using two serial data loggers. One is for the GPS; the other is for the attitude-heading reference system described below.
|

|
|
|
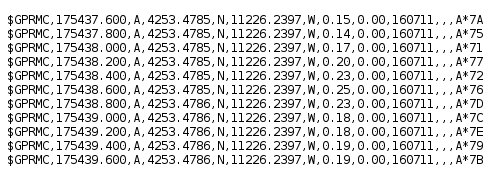
For the GPS, it records gobs of data (time, latitude, longitude, speed, and some other stuff) five times a second.
|
|
|
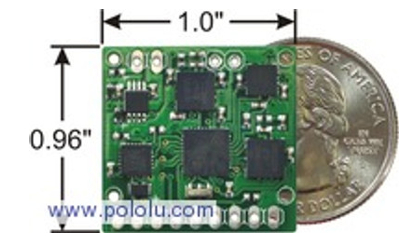
The attitude-and-heading reference system (AHRS) packs three gyroscopes, accelerometers, and magnetometers into an unbelievably itty-bitty package. Not only that, but it does all the sensor fusion and filtering.
|
|

|
|
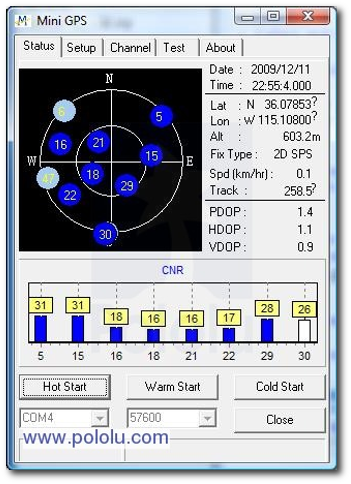
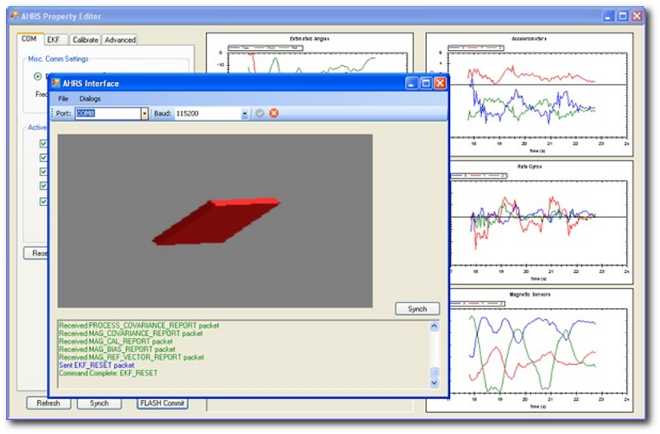
It's connected through a serial-to-USB converter to a real-time display on the computer. Again, this is nice for development, but in a standalone system, I used another serial data logger.
|
|
|
Interpreting its data (yaw, pitch, and roll, yaw, pitch, and roll rate, magnetic x, y, and z, gyroscopic x, y, and z, and accelerometer x, y, and z) is challenging.
|

|
|
Both loggers write to their own microscopic 2GB flash cards that I then pop into an adapter and read on my laptop.
|

|
|
|
© 2026 Dan Tappan and Eastern Washington University
— last updated 27 May 2026 11:43