Three-Axis Electromechanical Flight-Simulation Gimbal
|
|
| This project is a computer-controlled electromechanical three-axis gimbal for a model of a small unmanned aerial vehicle. It supports three degrees of freedom (yaw, pitch, roll), as well as standard flight-control surfaces (ailerons, flaps, elevator, and rudder) and propeller, such that their behavior reflects any number of programmatic models driving it. I have a lot of aviation-related research interests that could be physically visualized with this device. |
| Along with classroom demonstrations of hardware/software interfacing, especially the mechatronics integration of computer science, electrical engineering, and mechanical engineering, it also serves as a colorful, entertaining, hands-on recruitment tool for my work with local schools and prospective students. |
|
|
|
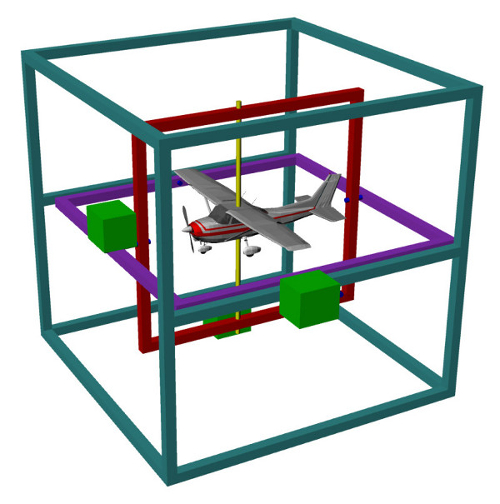
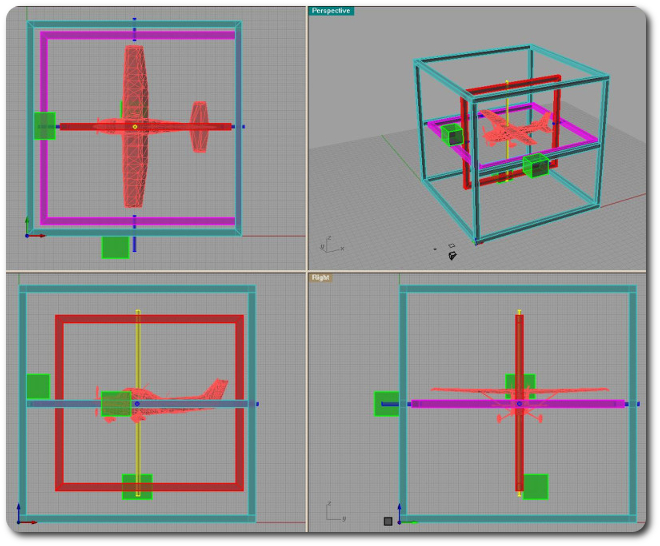
The expected result is a two-foot cube roughly like this prototype.
|
|
|
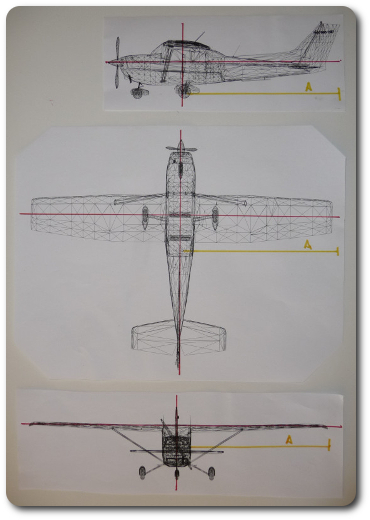
One of the strategies I try to instill in my students to make the visualization of any kind of model meaningful, not just arbitrary, to help make it more intuitive and understandable. In this case, red refers to roll, yellow to yaw, and purple to pitch.
|
|
|
|
|
|
|
|
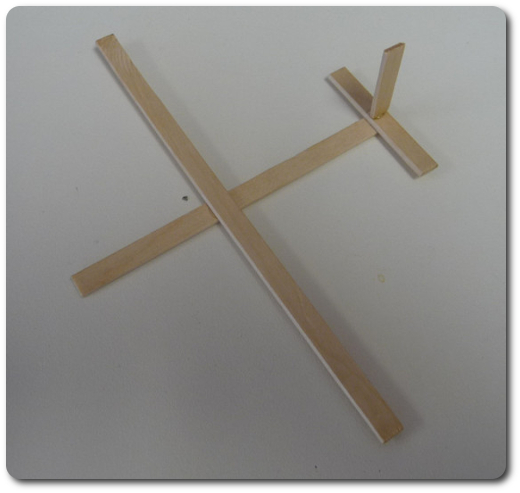
Despite the high-tech RhinoCAD 3D drawings above, my true reality check for the degrees of freedom is made of popsicle sticks, an index card on a pen, and a Dungeons and Dragons die on a pen!.
|
|

|
|
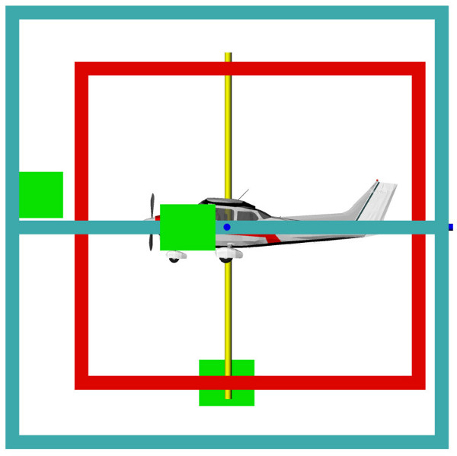
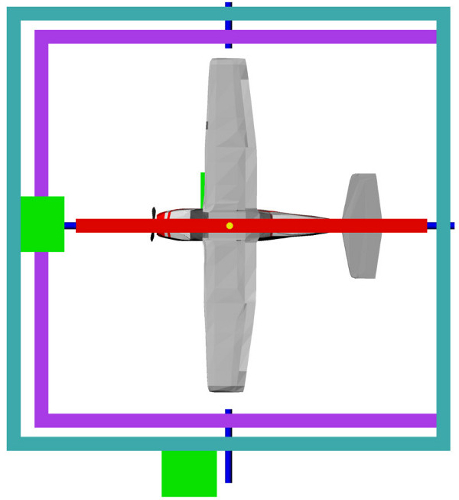
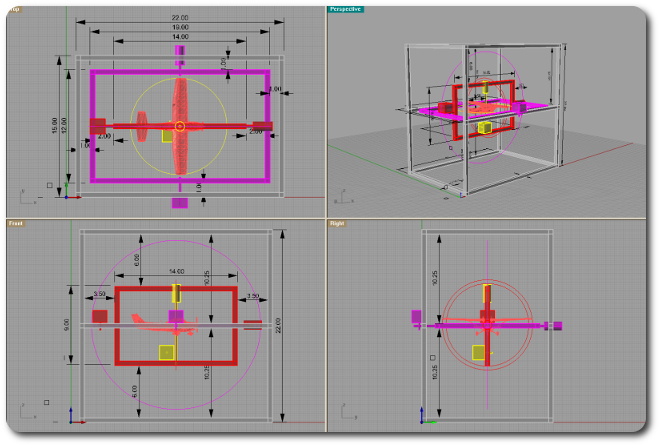
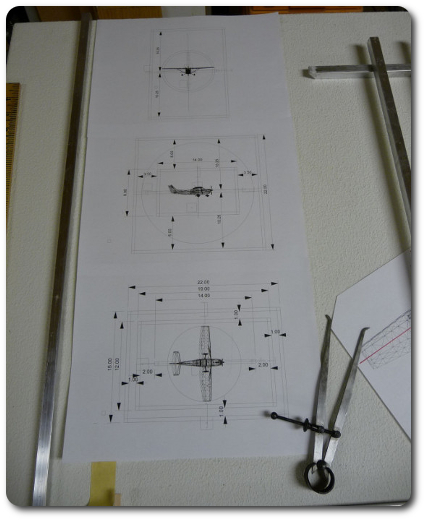
The combination of both representations at this point helps to envision the paths followed by the UAV over its degrees of freedom and how much room needs to be allocated. I don't plan to use a Cessna 172 as the actual UAV, but its dimensions are the basis of this layout.
|
|
|
|
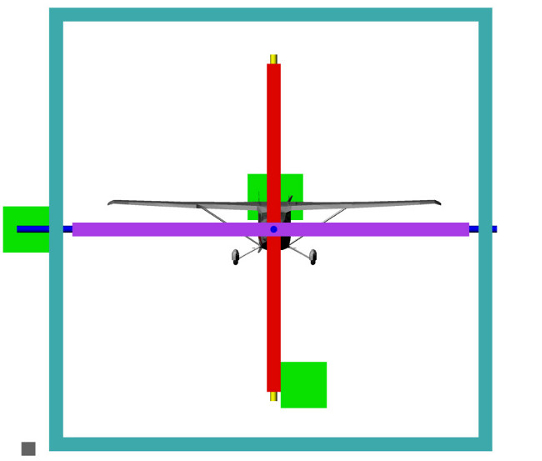
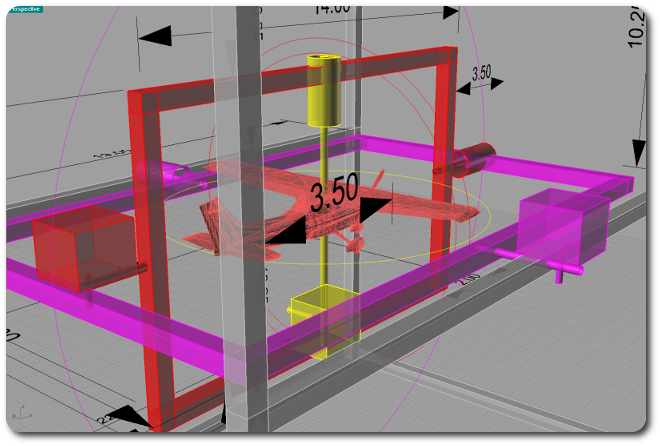
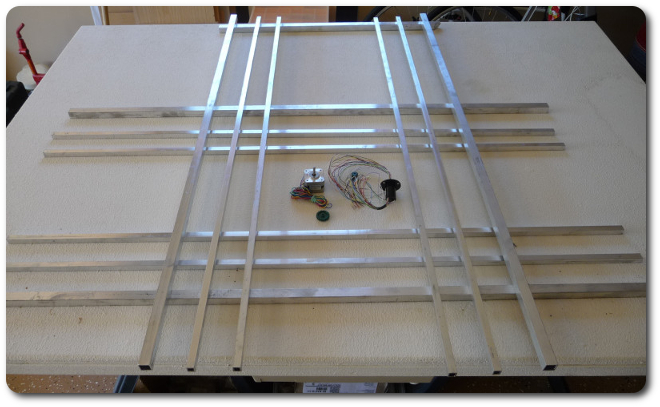
Here's the initial layout. It's neat at this point to envision how all of this will come together shortly. For me, engineering design never loses its magical — even miraculous — qualities.
|
|
|
|
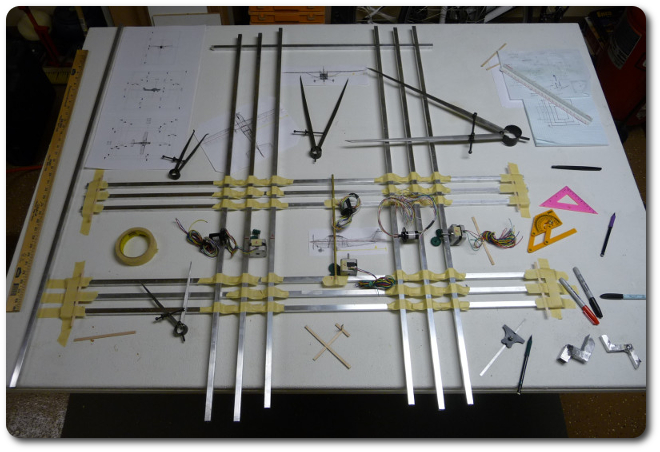
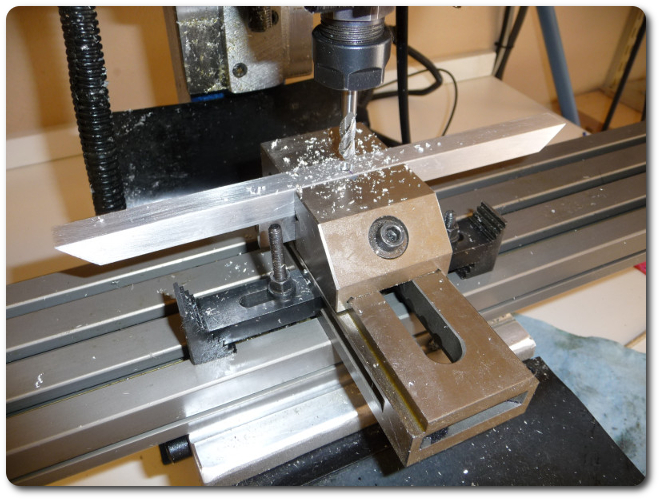
And now it's down to business. These are precision parts, and a lot of their holes and alignment must be done before assembly.
|
|
|
It didn't take long to replicate these. Computer-controlled fabrication makes life so much easier.
|

|
|
|
© 2025 Dan Tappan and Eastern Washington University
— last updated 9 Apr 2025 15:44